Convolution in ConvNets Tutorial
In ConvNets, convolution refers to the process of applying a filter or a kernel to an input or feature map.
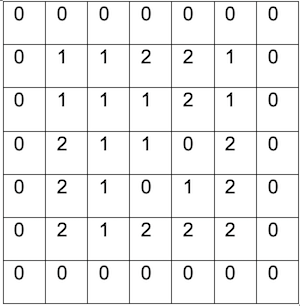
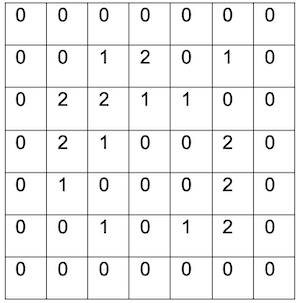
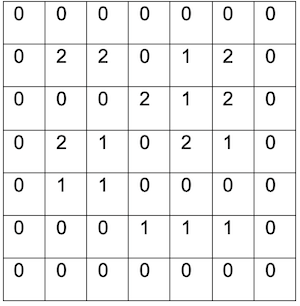
Input image (7x7x3)
x[:, :, 0]
x[:, :, 1]
x[:, :, 2]
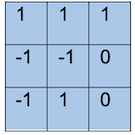
Filter W0 (3x3x3)
w0[:, :, 0]
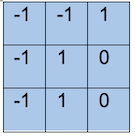
w0[:, :, 1]
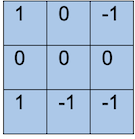
w0[:, :, 2]
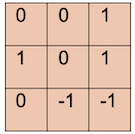
Filter W1 (3x3x3)
w1[:, :, 0]

w1[:, :, 1]
w1[:, :, 2]

Bias b0 (1x1x1)
b0[:, :, 0]
1
Bias b1 (1x1x1)
b1[:, :, 1]
0
Output feature maps (3x3x2)
The size of the output feature map is determined by several factors including the size of the input or feature map, the size of the filter, and the stride of the convolution operation.
output[:, :, 0]
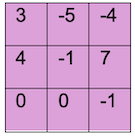
output[:, :, 1]